
Радионавигационные приборы (РНП) используются на судах для определения местоположения судна (наблюдения) в море с помощью радиоволн. Особенно успешно используются при навигации в условиях ограниченной видимости, когда невозможно определить местоположение судна визуальными методами.
Виды радионавигационных приборов
РНП можно разделить на три группы:
- радиолокационные станции — устройства, предназначенные для обнаружения надводных объектов и измерения направлений и расстояний до них.
- радиомаяки и радиопеленгаторы. Радиомаяк — это круговая или направленная передающая радиостанция, обозначенная на карте в определенных координатах и излучающая сигналы в виде точек и тире (букв азбуки Морзе) через антенную систему. Радиопеленгатор — это приемное устройство, предназначенное для определения направления (пеленга) на источник радиоволн (радиомаяк).
- радионавигационные системы. Это комплекс электронных устройств, предназначенный для обеспечения безопасного плавания (определение местоположения судна, плавание судов в опасных для мореплавания районах) независимо от гидрометеорологических условий и оптической видимости.
РНС состоит из трех взаимосвязанных частей:
- прибрежных радиопередающих или других станций с известными координатами;
- береговая спецтехника, с помощью которой управляются передающие станции;
- судовые приемники, которые принимают сигналы от радиопередающих станций и с помощью компьютерных технологий автоматически определяют местоположение судна и другие навигационные данные.

История создания
Радионавигационные системы играют важную роль в навигации. Они позволяют точно определять положение судна в море независимо от погодных условий и состояния моря. Работа радионавигационных систем основана на измерении разницы расстояний до передающих станций, расположенных на берегу. В каждом методе, используемом для определения разности расстояний, изолиния, соответствующая постоянной разнице, является гиперболой. Поэтому эти радионавигационные системы также называют гиперболическими навигационными системами. На определение местоположения судна с их помощью у судоводителя уходит несколько минут. Современные глобальные РНС охватывают всю площадь земной поверхности и позволяют определять местонахождение судна в любой точке Мирового океана по двум-шести линиям положения.
Запуск в нашей стране в 1957 году первого в истории человечества искусственного спутника Земли открыл широкие перспективы для обеспечения навигации. Полярные орбиты навигационных искусственных спутников Земли (НИСЗ) расположены таким образом, что с корабля, где бы он ни находился, можно было определять его положение не реже одного раза в 2 часа.
Аппаратура НИСЗ состоит из радиопередающих устройств, канала связи с наземными станциями управления, оборудования для стабилизации спутника в космосе, запоминающих и вычислительных устройств. Как только корабль оказывается в зоне «радиовидимости» следующего спутника, бортовое устройство автоматически преобразует сигналы, полученные со спутника. На световом табло в рубке отображаются координаты судна, его курс и скорость, а также время определения местоположения.
Преимуществами спутниковой системы являются практически неограниченная дальность действия, высокая помехозащищенность и высокая точность определения местоположения судна в любых метеорологических условиях.
К судовым электронавигационным приборам относятся гироком-пасы, лаги и эхолоты.
Предпосылки к созданию РНС
На заре авиации не было радаров, поэтому экипаж самолета самостоятельно определял их местонахождение и сообщал диспетчеру. Экипаж визуально ориентировался на местности по населенным пунктам, озерам, рекам, холмам и находил свое место на карте. Этот метод требовал постоянного визуального контакта с землей, который в плохую погоду просто отсутствовал, что ограничивало возможность летать.
Первыми навигационными средствами были радиомаяки (NDB — Non-Directional Beacon), передающие опознавательный сигнал (это две или три буквы латинского алфавита, которые передаются кодом Морзе) на определенной частоте по круговой диаграмме направленности. Ну а приемник на самолете указывает направление на такой радиомаяк. Для определения точного местоположения необходимо как минимум 2 радиомаяка (два азимута от них). Так появились первые воздушные трассы для полетов по приборам, в том числе в облаках и ночью. Правда, вскоре точность определения координат стала недостаточной. Затем радиоинженеры создали высокочастотный всенаправленный радиомаяк VOR (Very high frequency Omni-directional Radio range). VOR передает свое опознавание в виде трехбуквенного кода Морзе.

Необходимость знать два азимута для определения своего местоположения требовала слишком большого количества маяков. Для решения этой проблемы было разработано так называемое дальномерное оборудование (DME), и с помощью специального бортового приемника стало возможно определять расстояние от DME. А если устройства VOR и DME расположены в одной точке, то легко вычислить свое местоположение по азимуту и расстоянию от системы VORDME.
Однако для того, чтобы повсюду расставлять маяки, их нужно слишком много, и часто нужно еще точнее определять свое местоположение. Так появились так называемые «точки» (привязки, пересечения), азимуты которых всегда были известны от двух и более радиомаяков. То есть самолет мог легко определить, что он в данный момент находится точно над этой точкой. Воздушные трассы теперь проходят между маяками и точками. Появление систем VORDME позволило размещать точки не только на пересечениях азимутов, но и на радиалах и расстояниях от объектов VORDME.
Общие сведения
В настоящее время в морском судоходстве широко используются шесть основных типов РНС:
- фазовая РНС на длинных волнах («Декка-Навигатор»);
- фазовая РНС на сверхдлинных волнах («Омега»);
- импульсно-фазовые РНС (РСДН, «Лоран-С» и др.);
- низкоорбитальные спутниковые РНС («Цикада», СССР; «Транзит». США»);
- системы радиопеленговании (радиомаяки с радиопеленгаторами);
- секторные радиомаяки (ВРМ-5, «Консол», «Консолан»).
Последние два типа РНС являются амплитудными и позволяют измерять радионавигационный параметр (РНП) в виде азимутов (углов), остальные РНС — в виде разностей расстояний до двух станций цепочки или нескольких последовательных положений спутника на орбите.
Точность определения местоположения по РНС зависит в основном от взаимного расположения судна и береговых станций цепи (геометрического фактора) и погрешностей показаний индикатора (влияние условий распространения радиоволн, устойчивости шкалы времени).
Фазовые РНС
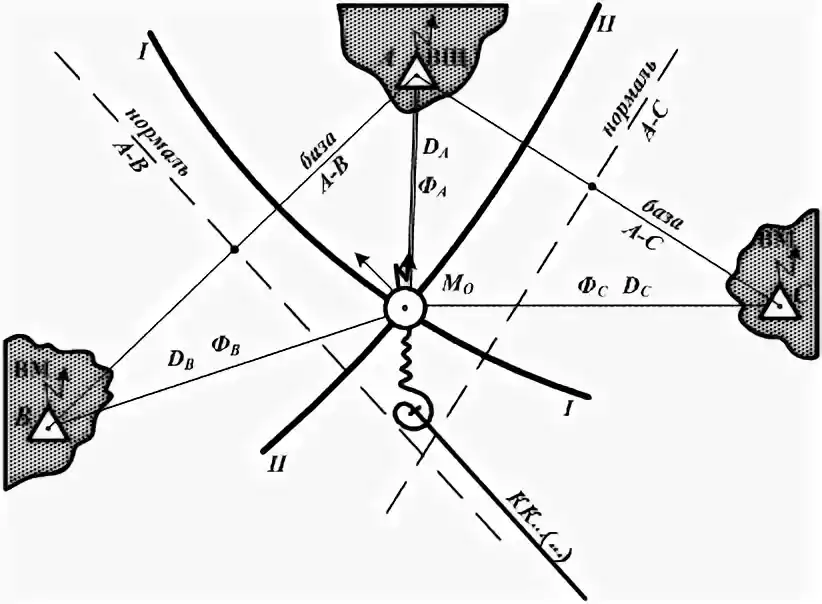
Принцип основан на измерении разности расстояний до ориентиров с помощью фазового метода. Судно измеряет разность фаз непрерывных волн. колебания, излучаемые 2 береговыми станциями с помощью приемников и фазометров. Известно, что разница расстояний — это величина const на гиперболе для двух точек. Таким образом, измеряя разность фаз колебаний излучения береговых станций, можно найти линию положения корабля на гиперболе с фокусами в точках.
Обратите внимание! Для повышения точности определений скорости пользуются специальными крупномасштабными планшетами в проекции Меркатора, охватывающими участки моря размером 5X6 миль, на которых нанесены сетки гипербол.
В новых моделях двусмысленность устраняется за счет получения более широких дорожек, «неровные» дорожки называются зонами. Обычно количество базовых зон приближается к десяти.
Импульсно-фазовые РНС
Радионавигационная система Loran-c (отечественный аналог — «Чайка») относится к дифференциальному дальномеру РНС с синхронизацией моментов излучения и фазы импульсных сигналов, излучаемых наземными передающими станциями. Станции организованы в цепочки по 3-5 станций, которые передают сигналы на одной частоте с одинаковым периодом повторения для группы, некоторые станции работают одновременно в двух цепочках в течение двух периодов повторения. Каждая схема РНС состоит из одной ведущей и ведомой станций, работающих с одним и той же, только этой схемой, с назначенным периодом повторения последовательности импульсов.
Дальность действия системы Loran-C на суше и на море составляет 1400-1800 и 1800-2000 км соответственно. Мощность излучения передающих станций 200 … 1000 кВт. Надежность — 99,7%.
Погрешность синхронизации станций в цепи 30-50 нс. Точность позиционирования — до 10-50 м в радиусе до 150-200 км.
Импульсно-фазовые РНС работают на частоте 100 кГц и излучают пакеты радиоимпульсов. Ведущие станции излучают 9 импульсов в пакете, за которыми следуют 8. Импульсы в пакетах кодируются в соответствии с фазой высокочастотного заполнения, что необходимо для автоматического поиска сигналов и устранения влияния многократных отражений предыдущих импульсов в пакете на последующие.
Фазовый код радиоимпульсов ведущих станций отличается от фазового кода ведомых станций, что обеспечивает идентификацию сигналов ведущих и ведомых станций во время автопоиска.
Ведомые станции, входящие в одну цепочку, отличаются друг от друга кодовым временем задержки их передачи пакетов радиоимпульсов относительно момента излучения ведущей станцией.
Ведомые станции в цепях РНС Loran-C обозначаются буквами W, X, Y, Z; в РНС РСДН — буквы B, C, D, D.
Цепочки отличаются друг от друга периодами повторения пакетов радиоимпульсов.
Обозначение (номер) цепочек состоит из числа десятков микросекунд, определяющих точное значение периода повторения сигналов данной цепочки Тп / 10.
Передача сигналов ведущими станциями всех цепочек Loran-C синхронизирована по всемирному времени (UTC).
Низкоорбитальные спутниковые РНС («Цикада», СССР; «Транзит». США»)
В настоящее время действуют две спутниковые навигационные системы (СНС) доплеровского типа — «Цикада» (СССР) и «Транзит» (США). Обе системы обеспечивают определение координат местоположения корабля в любое время суток и при любых метеорологических условиях. Зона покрытия системы Цикада без ограничений; системы «Транзит» — в диапазоне широт ± 88 °.
Каждая из систем включает в себя три основных части: командно-измерительный комплекс, искусственные спутники Земли (ИСЗ), потребительское оборудование.
Командно-измерительный комплекс состоит из ряда наземных станций слежения, станций передачи команд на борту спутника и вычислительного центра.
В системе «Цикада» используются спутники серии «Космос-1000» на орбитах, близких к круговой, с высотой около 1090–1100 км над уровнем Земли и периодом обращения около 108 минут; угол наклона орбит относительно экваториальной плоскости 83 °. При таком выборе параметров орбит спутников обеспечивается глобальность работы системы.
Параметры орбит спутников системы «Транзит» следующие: высота — 1075 км, период обращения — 107 мин, наклонение орбиты — почти 90 °, эксцентриситет — в пределах 0,003-0,02. Количество одновременно работающих спутников в системе до шести.

Спутники обеих систем некорректируемы, поэтому из-за различных возмущений наблюдаются смещения орбит относительно начальных значений.
Из-за разного характера структуры сигнала и типа модуляции, а также частотного разнесения исключается взаимное влияние сигналов со спутников Цикада и Транзит. Однако в рамках каждой системы проявляется взаимное влияние спутниковых сигналов, что сказывается на качестве наблюдений, проводимых с помощью судового оборудования.
РНС Транзит является зарубежным аналогом РНС Цикада.
При сближении спутников системы на расстояниях, на которых разделение сигналов по частоте в судовых приемниках затруднено, оборудование одного из спутников отключается по командам с наземных станций. Даты активации, причины и дата планируемой последующей активации спутников объявляются в навигационных предупреждениях,
Для каждой из систем средний интервал между наблюдениями с пятью спутниками составляет от 40 до 110 мин в зависимости от широты участка.
Передача навигационной информации со спутника осуществляется по двум частотным каналам 400 МГц и 150 МГц, режим передачи — непрерывный. Частоты передаваемых сигналов отличаются высокой стабильностью. В состав передаваемых данных, используемых для целей навигации, входят параметры, характеризующие пространственное положение спутника в фиксированные моменты времени, идентификационный номер спутника, отметки времени и сигналы синхронизации. Система «Цикада» работает по шкале зимнего московского времени, система «Транзит» — по шкале времени UTC.
Спутниковая РНС “Навстар“
Данная РНС предназначена для определения местоположения различных мобильных объектов в любой точке Земли или околоземного пространства в любое время суток, независимо от погодных условий. После полного развертывания система Навстар должна состоять из 18 (24) спутников на шести орбитах, по три равномерно расположенных спутника на каждой. Орбиты почти круговые с высотой H = 20240 км. Угол наклона i = 55°. В этом случае плоскости орбит пересекаются под прямым углом, образуя восемь равных октантов на поверхности Земли.
Это обеспечивает однородную область точности по всей поверхности земли. Орбитальный период спутника составляет 12 часов. Радиус зоны радиовидимости 76°. Одновременно можно наблюдать от четырех до семи спутников. Местоположение будет определяться методом пассивного дальномера до четырех спутников, наиболее удобно расположенных.
К ним относятся три спутника с малой высотой и разностью азимутов около 120 ° и один спутник в зените наблюдателя. На спутниках используются цезиевые стандарты частоты с нестабильностью 10-13 в сутки.
Информация принимается на двух частотах 1227,60 и 1575,42 МГц с использованием псевдошумовой модуляции. Мощность излучения 450 Вт.
Измеряемые параметры радионавигации: задержка и доплеровский сдвиг частоты принимаемого сигнала относительно его модели, сформированной в судовой навигационной аппаратуре. Задержка позволяет определить расстояние, доплеровский сдвиг, смещение — радиальную скорость.
Каждый спутник излучает сложный сигнал на двух частотах, состоящий из точного навигационного сигнала типа P (точный код) и грубого навигационного сигнала типа C / A (грубый / получение). Сигнал защищен от несанкционированного использования и позволяет проводить высокочастотные навигационные измерения, C / A открыт для всех потребителей и позволяет проводить навигационные измерения с пониженной точностью.
В целях экономии при вводе в эксплуатацию РНС Навстар планируется закрыть все остальные подконтрольные США РНС: Транзит, Лоран-С, Омега и т. д.
В России существует аналогичная по характеристикам РНС «Глонасс».

Концепции для новых идей
И GPS, и другие глобальные навигационные спутниковые системы (ГНСС) были вынуждены изменить свою концепцию развития и застраховаться системами, построенными на несколько иных принципах.
Интересно! РНС ГЛОНАСС и GPS – спутники для измерения времени и д дистанции) относятся к системам, использующим в основном псевдодальномерный способ определения, а для решения дополнительных задач (определение скорости) – доплеровский.
Сегодняшняя доступность, высокая точность и низкая стоимость услуг ГНСС для потребителей имеют обратную сторону с точки зрения уязвимости к помехам. Для маломощных сигналов ГНСС (в частности, GPS передает сигнал со спутников, находящихся на расстоянии 20 000 км от поверхности Земли и, естественно, имеющих энергетические ограничения), опасность внешних атак с подделкой сигнала и преднамеренными помехами, а также снижение производительности в некоторых операционных средах.
В США еще в 2004 году указом президента было одобрено создание системы резервного копирования GPS для обеспечения бесперебойного предоставления услуг PNT. Это модернизированная система, основанная на импульсно-фазовой навигационной системе Loran (Long Range Navigation), которая была разработана в США во время Второй мировой войны. Усовершенствованная система Loran будет дополнена цифровой обработкой сигналов.
Изначально комплекс Loran предназначался для навигационного обеспечения ударных сил авиации и флота при решении боевых задач. Высокие тактико-технические характеристики этой системы предопределили ее массовое использование гражданскими потребителями в большинстве стран мира для решения экономических задач. В отличие от систем ГНСС, система Loran передает сигнал с наземных мачт, где потенциальная энергия не ограничена.
Сегодня продолжается обсуждение будущих APNT (Alternative Positioning, Navigation, and Timing). Например, хоть и ясно, что APNT должны быть развернуты в случае отказа GNSS, нет единого мнения о продолжительности и широте охвата с точки зрения выбора регионов, в которых будут работать APNT. В конце концов, уже было несколько серьезных инцидентов, связанных с глушениями GNSS или подделкой сигналов, а использование PNT продолжает улучшаться, создавая новые угрозы. Кроме того, разные заинтересованные стороны имеют в виду разные временные рамки для APNT.
Кроме того, потребуется значительное время для создания, ввода в эксплуатацию или модификации существующей инфраструктуры системы PNT или APNT. С точки зрения потребительских устройств (приемников) или программного обеспечения потребительское навигационное оборудование (NAP) APNT не похоже на NAP GNSS, и здесь нельзя рассчитывать на быстрый рост продаж или регулярные обновления программного обеспечения.